ROS1 Noetic
开源项目
Docker 部署
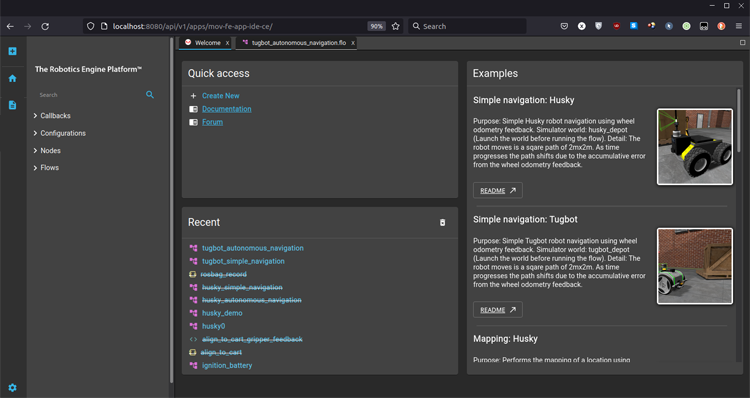
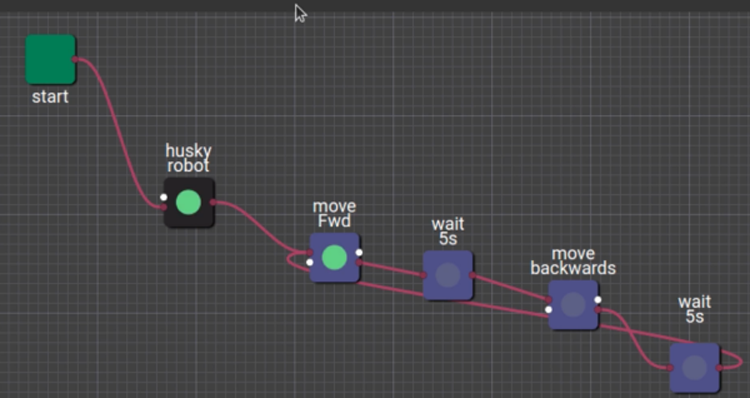
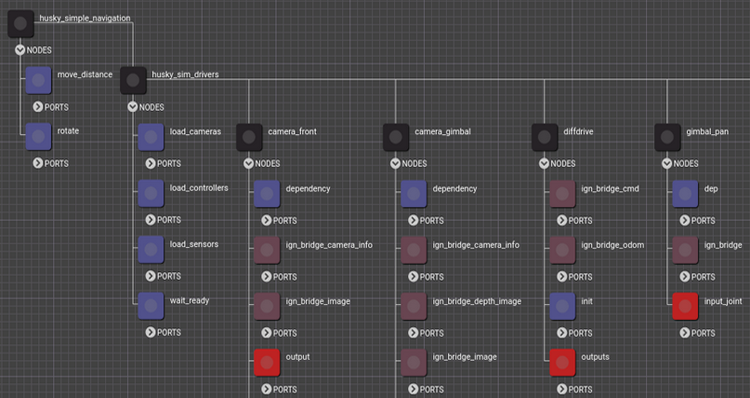
MOV.AI Flow
为 ROS 带来可视化与结构化的 IDE
MOV.AI Flow™ 是一款建立在 ROS(机器人操作系统)之上的集成开发环境,为 ROS 带来了可视化和结构化能力。它让您能够更快地开发、即时了解 ROS 项目全貌并轻松调试。通过 Web 化的可视化编辑器、状态机编排与调试工具链,加速机器人软件开发,促进现场部署机器人的部署、运行和技术支持。